








螃蟹是一种古老而神奇的动物
螃蟹是一种十分古老的生物,他们种类繁多,大小不一,而最早的螃蟹化石可以追溯到侏罗纪时期。
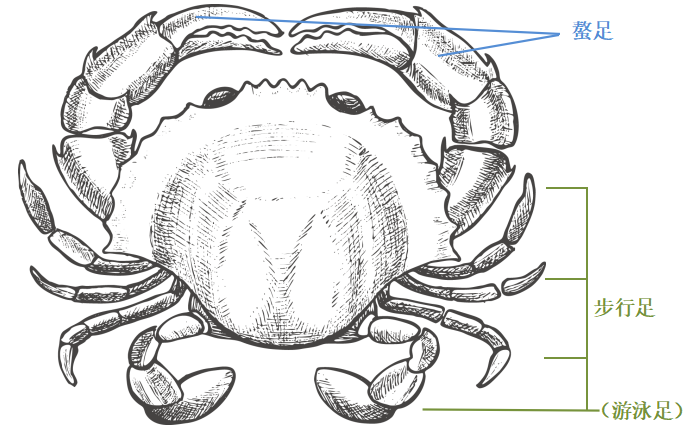
螃蟹属于十足目甲壳动物,那厚厚的外骨骼,主要由高度矿化的几丁质组成,起到支撑和保护的作用。同属于十足目的还有我们熟悉的虾,而不同于虾的是,螃蟹的尾部卷曲于胸部之下。它的第一对胸足特化为螯足,也就是那对大钳子,表面包裹着坚硬的壳,用来捕食、防御和攻击,更重要的是可以吸引女朋友!剩下的四对附属肢是螃蟹的步行足,也就是它们“横行江湖”的“脚”,有一些种类的螃蟹,比如梭子蟹类,附属肢指节扁平如桨,可以帮助它们游泳。
螃蟹具有丰富的水陆两栖经验
螃蟹不仅是一种古老的生物,分布也十分广泛,它存在于世界上所有的海洋中,还有很多生活在淡水和陆地上。就这样,既能深潜海底,还能横行陆地的螃蟹不仅引起了吃货们的注意,自然也引起了科学家们的关注。
在生物不断进化的过程中,多足动物能在不规则的复杂地形上行进,是它们在自然界的残酷竞争中存活下来的优势之一。同样,面对越来越复杂的探索环境,如岩洞、海底、极地、地外星球,或者是石块瓦砾遍布、救援人员难以到达的灾后现场,科学家思考,如何在或崎岖、或松软、或湿滑的地形上,越过重重障碍完成任务,或在层层关卡中发现“宝藏”?于是他们模仿多足动物的运动机理,研制出多足仿生步行机器人,结果显示,这样的机器人能更稳定和高效地在复杂地形上行走和工作,而水陆两栖、经验丰富的螃蟹自然是被模仿和研究的重点对象啦!
国内外已有多款螃蟹机器人研发成功,其中,韩国海洋科学技术院和其国内的5所大学联合研发了一“只”长2.45米、宽2.42米、高2米、重达600公斤的螃蟹机器人——Crabster,引起广泛关注。
作为一款仿生机器人,Crabster可以像螃蟹一样在水下游泳。
也可以在陆地和水下爬行,还能夹断或移开阻碍它去路的障碍物。

和很多以鱼为灵感的水下机器人相比,螃蟹机器人的设计不仅能避免因螺旋桨制动激起海底碎片,造成海底勘测失真,还能依靠相对灵活的步行足到达其他机器人难以触及的偏僻地带。同时,它还配备了高分辨率扫描声纳、声学多普勒电流分析仪和声学、光学相机,可以帮助人类完成高难度的潜水、勘探等水下作业。据说,不久的将来还能带人类海底漫游和探险。
仿生学的研究不只“螃蟹”
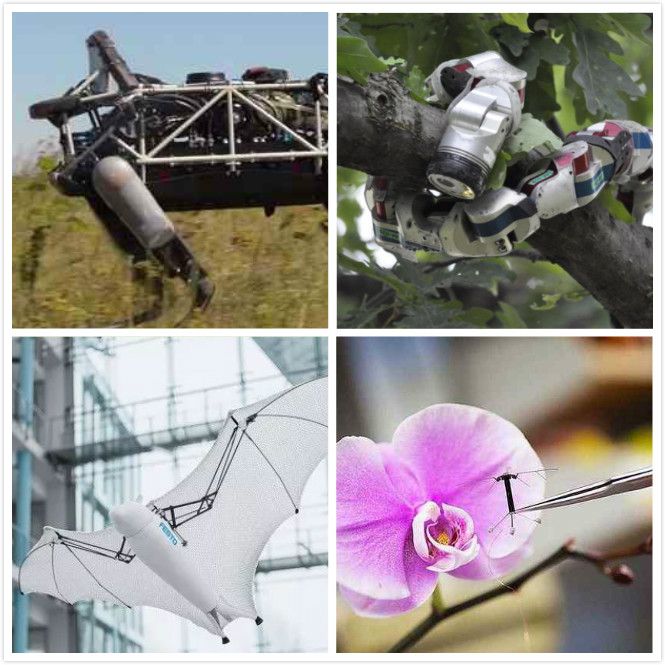
当然,仿生机器人也不只有螃蟹,还有可以在陆地上奔跑的猎豹机器人,在丛林穿梭攀爬的蛇形机器人,在天空滑翔的狐蝠机器人,以及可以侦查隐蔽的蜜蜂机器人等等。
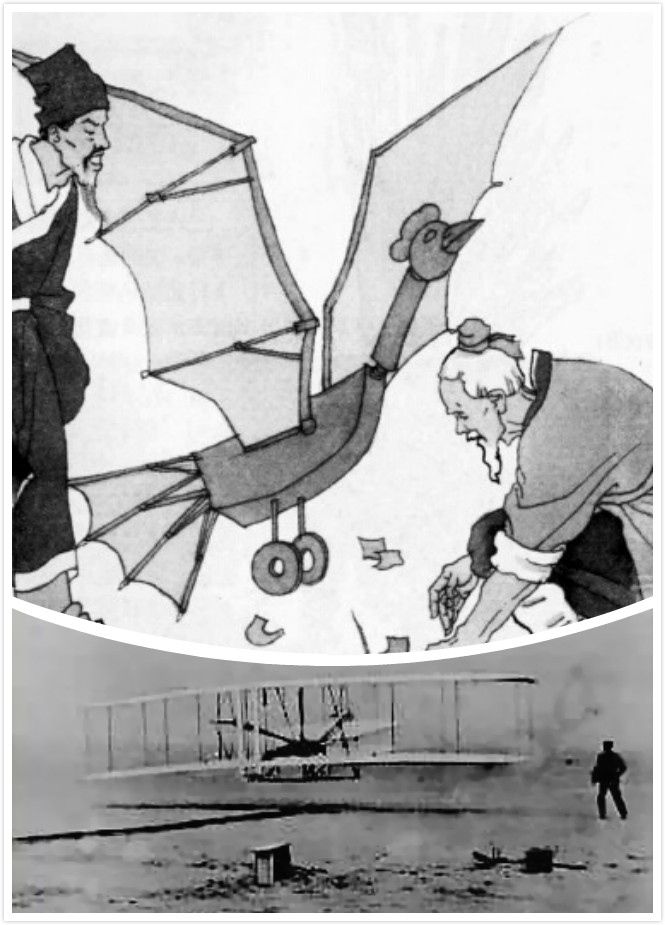
而仿生学的应用也不只有机器人领域。人类自古便开始了模仿生物结构和功能,发明新技术的探索。比如,对鸟类的研究,我国先民在两千多年前,就发明了风筝;东周时,研制了能飞的木鸟;西汉时,用鸟的羽毛做出翅膀,模拟鸟的飞行。达·芬奇用了二十多年时间研究鸟的飞行原理,并完成《论鸟的飞行》手稿。美国的莱特兄弟仔细观察和分析鸽子的飞行,于1903年成功进行了第一架载人飞机的飞行试验。
随着科技的不断发展,人类还模拟蝙蝠发出和接收超声波发现物体的原理,发明了雷达,广泛应用于军事和航空;模拟苍蝇触角上嗅觉感应器的结构制成一种小型气体分析仪,应用在潜水艇、太空舱、矿井等的气体监测;模拟苍蝇的楫翅,又被称为平衡棒,制成了振动陀螺仪,应用在航天和自动驾驶;还模拟蛙眼的视觉原理,制成电子蛙眼应用在飞机、交通要道和相机……仿生学发展至今,可谓无处不在,对人类社会影响深远,就连未来人工智能的发展和研究也将仿生学列入其中。
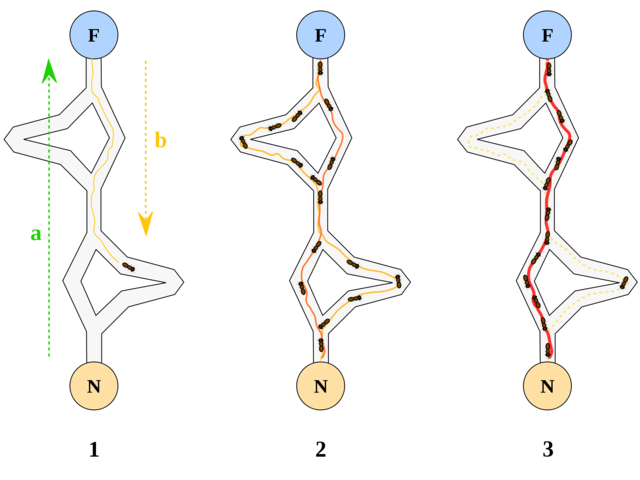
类似蚂蚁寻路的“蚁群算法”(图片来源:sciencedirect.com)

人脑的思维(算法)依赖于各种细胞和分子构件的硬件(图片来源:robohub.org)
可见,仿生学是人类技术和自然创造的碰撞与结合,大自然蕴含的无数奇妙形态与功能,皆是仿生学的源头,并仍有许多未被人类认知和探索的奥秘,在技术研发和应用的同时,我们更应该珍惜和保护大自然这个给予我们灵感和启示“智库”,保护生态环境,保护生物多样性。
部分图片来自网络,如有版权问题请与我们联系
















留言